
Sierpinski Madness and overloading operators
25 Mar 2012In a previous post, I looked at creating a Sierpinski triangle using F# and WPF. One of the pieces I was not too happy about was the function I used to transform a Triangle into a next generation triangle:
type Point = { X:float; Y:float }
type Triangle = { A:Point; B:Point; C:Point }
let transform (p1, p2, p3) =
let x1 = p1.X + 0.5 * (p2.X - p1.X) + 0.5 * (p3.X - p1.X)
let y1 = p1.Y + 0.5 * (p2.Y - p1.Y) + 0.5 * (p3.Y - p1.Y)
let x2 = p1.X + 1.0 * (p2.X - p1.X) + 0.5 * (p3.X - p1.X)
let y2 = p1.Y + 1.0 * (p2.Y - p1.Y) + 0.5 * (p3.Y - p1.Y)
let x3 = p1.X + 0.5 * (p2.X - p1.X) + 1.0 * (p3.X - p1.X)
let y3 = p1.Y + 0.5 * (p2.Y - p1.Y) + 1.0 * (p3.Y - p1.Y)
{ A = { X = x1; Y = y1 }; B = { X = x2; Y = y2 }; C= { X = x3; Y = y3 }}
Per se, there is nothing wrong with the transform function: it takes 3 points (the triangle corners), and returns a new Triangle. However, what is being “done” to the triangle is not very expressive – and the code looks rather ugly, with clear duplication (the exact same operation is repeated on the X and Y coordinates of every point).
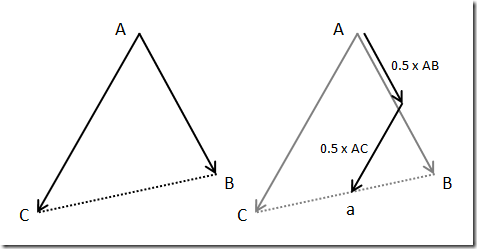
Bringing back blurry memories from past geometry classes, it seems we are missing the notion of a Vector. What we are doing here is taking corner p1 of the Triangle, and adding a linear combinations of the edges p1, p2 and p1, p3 to it, which can be seen as 2 Vectors (p2 – p1) and (p3 – p1). Restated that way, here is what the transform function is really doing:
A –> A + 0.5 x AB + 0.5 x AC
A –> A + 1.0 x AB + 0.5 AC
A –> A + 0.5 x AB + 1.0 x AC
In graphical form, the first transformation can be represented as follows:
In order to achieve this, we need to define a few elements: a Vector, obviously, a way to create a Vector from two Points, to add Vectors, to scale a Vector by a scalar, and to translate a Point by a Vector. Let’s do it:
type Vector =
{ dX:float; dY:float }
static member (+) (v1, v2) = { dX = v1.dX + v2.dX; dY = v1.dY + v2.dY }
static member (*) (sc, v) = { dX = sc * v.dX; dY = sc * v.dY }
type Point =
{ X:float; Y:float }
static member (+) (p, v) = { X = p.X + v.dX; Y = p.Y + v.dY }
static member (-) (p2, p1) = { dX = p2.X - p1.X; dY = p2.Y - p1.Y }
type Triangle = { A:Point; B:Point; C:Point }
Thanks to operators overloading, the transform function can now be re-phrased in a much more palatable way:
let transform (p1:Point, p2, p3) =
let a = p1 + 0.5 * (p2 - p1) + 0.5 * (p3 - p1)
let b = p1 + 1.0 * (p2 - p1) + 0.5 * (p3 - p1)
let c = p1 + 0.5 * (p2 - p1) + 1.0 * (p3 - p1)
{ A = a; B = b; C = c }
… and we are done. The code (posted on fsSnip.net works exactly as before, but it’s way clearer.
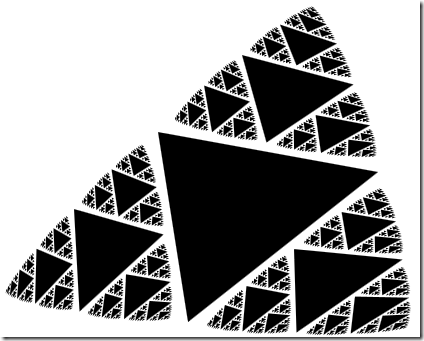
It can also be tweaked more easily now. I got curious about what would happen if slightly different transformations were applied, and the results can be pretty fun. For instance, with a minor modification of the transform function…
let transform (p1:Point, p2, p3) =
let a = p1 + 0.55 * (p2 - p1) + 0.5 * (p3 - p1)
let b = p1 + 1.05 * (p2 - p1) + 0.45 * (p3 - p1)
let c = p1 + 0.5 * (p2 - p1) + 0.95 * (p3 - p1)
{ A = a; B = b; C = c }
… we get the following, bloated “Sierpinski triangle”:
Add a bit of transparency, some more tweaks of the linear combinations,
let transform (p1:Point, p2, p3) =
let a = p1 + 0.3 * (p2 - p1) + 0.6 * (p3 - p1)
let b = p1 + 0.8 * (p2 - p1) + 0.3 * (p3 - p1)
let c = p1 + 0.6 * (p2 - p1) + 1.1 * (p3 - p1)
{ A = a; B = b; C = c }
and things get much wilder:
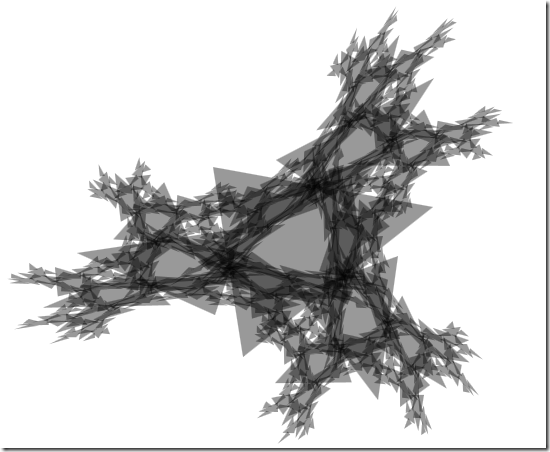
I don’t think these are really Sierpinski triangles any more, but I had lots of fun playing with this, and figured someone else might enjoy it, too… If you find a nice new combination, post it in the comments!
Source code: fsSnip.net